
Szukaj
Znalazłem 129 takich materiałów

"...teraz tak całkowicie poważnie to musze wam powiedzieć że na 5 bięgu zrywa łańcuch i wykręca półośki na drugą stronę"
71

Układ ABS został zaprojektowany tak, aby możliwe było omijanie przeszkody przy wciśniętym pedale hamulca. Ponieważ ABS zabezpiecza przed zablokowaniem kół, ryzyko poślizgu jest mniejsze. Przy dużych prędkościach już sam manewr gwałtownego omijania przeszkody, bez hamowania, może wywołać poślizg, jednak jego skutki ma minimalizować układ ESP. W razie potrzeby każdy z tych systemów jest w stanie oddziaływać na układ hamulcowy, niezależnie od tego, co robi kierowca. Wytracając prędkość, należy więc cały czas intensywnie hamować.
9

66
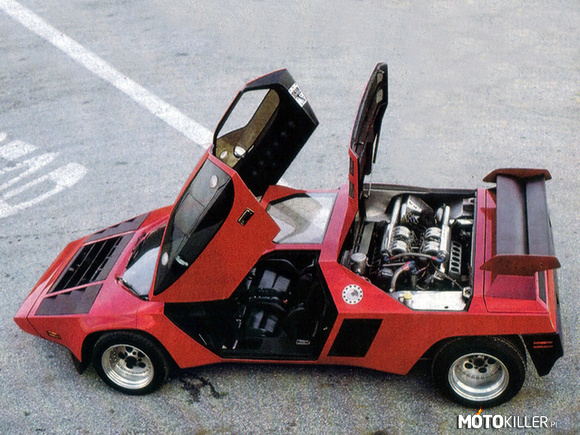
Dane Techniczne:
Marka i model: Vector W2
Premiera: 1973
Lata produkcji: 1976-1989
Silnik: Chevrolet Small-Block V8, dostrojony przez firmę Donovan 70° (8-cylindrowy w układzie widlastym)
Turbodoładowanie: TAK - Podwójne doładowanie firmy AiResearch
Liczba zaworów.: 16v (2 zawory na cylinder)
Pojemność skok.: 5730 cm³
Układ zasilania: wtrysk bezpośredni
Moc kW (KM): 441 kW (600 KM) przy 5700 1/min
Max. moment obrotowy: 800 Nm przy 4800 1/min
Stopień sprężania: 8,1:1
Przełożenia / skrzynia biegów: 3-biegowa automatyczna, napęd na tylną oś
Układ hamulcowy: Stalowe, wentylowane z przodu i z tyłu, zaciski 4-tłoczkowe, z tyłu 2-tłoczkowe
Średnica tarcz – (Przód: Ø 309 mm / Tył: Ø 309 mm)
Karoseria / Nadwozie: Konstrukcja stalowa, aluminium, kompozyty.
Rozstaw osi: 2616 mm
Opony: Felgi - aluminiowe (przód: Goodyear GS-E - 225 x 55 / VR15 / tył: Goodyear GS-E - 345 x 35 / VR15)
Miary D x S x W (mm): 4368 x 1930 x 1080 mm
Zbiornik paliwa: 113 l
Masa własna: 1262 kg
Prędkość maksymalna (km/h): 322 km/h
Przyśpieszenie
0 – 100 km/h: 4,5 s
Droga hamowania
ze 100km b/d
Zużycie paliwa
na 100km b/d
Ciekawostki:
Vector W2 uznawany był jako najszybsze auto świata, chociaż jego prędkości nigdy nie zmierzyły niezależne źródła.
Auto wystepowało również w kilku filmach i reklamach.
W Polsce auto znane przede wszystkim dzięki produkcji tureckich gum Turbo, w których zawsze z gumą do żucia dołączana była jedna naklejka. Obecnie naklejki mają status kolekcjonerski. W Polsce obrazki z gumami produkowane były w seriach, które wychodziły od 1989 do roku 1991 jako I seria, i jako II seria od 2003 do 2007.
W Stanach Zjednoczonych auto było przedmiotem wielu spraw sądowych o przywłaszczenie marki Vector, które wykorzystała w swoich reklamach firma "Vantage" (producent ekskluzywnych wyrobów nikotynowych) i firma "Goodyear" (światowy producent opon)
Producent twierdził, że auto może być wyposażone w silnik o mocach 450-600 a nawet istnieje zmodyfikowanie jednostki do 1500 KM kosztem większej zawodności. Jednak żaden model nie przekroczył nigdy 600 KM.
10

Silnik BMW 4,0 V8 286KM
Przyspieszenie 0-100 km/h 7,5 sek
Mosty Volvo Laplander portalowe + blokady pneumatyczne
Reduktor Atlas II 4,25
PTO własnej konstrukcji
Skrzynia Jeep
Zawieszenie FOX przód 12” tył 14”
Wahacze własnej konstrukcji
Hamulce Brembo 4-ro tłoczkowe + korektor siły hamowania
Wyciągarka Star 660 lina kevlar 80 m. Dragon Winch kevlar 35m
Kąt natarcia 90 st.
Kąt zejścia 85 st.
Zanurzenie 170 cm
Ogumienie SIMEX 36x12,5x16 + beadlock
Zbiornik paliwa 85L
Prędkoś max. 160km/h
41
50

"Wszystko zaczęto się w 1987 r. W ramach ówczesnego Centralnego Programu Badań Podstawowych uzyskano środki na zakup nowego Poloneza i realizację zawieszenia hydropneumatycznego mającego stanowić pierwszy etap budowy zawieszenia aktywnego. Grupa naukowców pod kierunkiem profesora Eugeniusza Kamińskiego postawiła sobie za zadanie stworzenie opracowania studyjnego, z założenia nie uwzględniając wielu zagadnień technologicznych, ekonomicznych i eksploatacyjnych. - Głównym celem było uzyskanie funkcjonalnego obiektu badań, a nie elegancja konstrukcyjna- podkreśla mgr inż. Janusz Pokorski, główny koordynator prac i twórca elektronicznego systemu pomiarowo-sterującego. W skład zespołu weszli także: dr Jan Olechowicz, który zajął się układem hydraulicznym, i dr Zdzisław Tomiryński, odpowiedzialny za stronę mechaniczną konstrukcji. Idea projektu sprowadzała się do opracowania systemu sterowania położeniem nadwozia. Zależnie od aktualnych warunków poruszania się auta, reagowałby on zarówno na wymuszenia zachodzące powoli (np. podczas hamowania lub pokonywania zakrętów), jak i szybko (wywołane np. przez nierówności jezdni), niwelując tym samym podłużne i poprzeczne przechyty samochodu. Oparcie się na istniejącym zawieszeniu Poloneza niosio ze sobą z jednej strony szanse, z drugiej ograniczenia. Pozwalało wprawdzie skupić się tylko na niezbędnych zmianach w układzie prowadzenia, ale ograniczało możliwości realizacji najwłaściwszych rozwiązań konstrukcyjnych i wymagało odpowiedniego dopasowywania nowo wprowadzanych elementów.
Adaptacji dokonywano własnymi siłami, dostępnymi metodami warsztatowymi, ucząc się na, nieuniknionych w takim wypadku, błędach. Kolejne etapy obejmowały praktyczną realizację układu aktywnego z wykorzystaniem zawieszenia hydropneumatycznego. Głowice hydropneumatyczne, wypełnione azotem i olejem, zakupiono jako gotowe elementy (z katalogu Boscha), podobnie jak elektrozawory (produkcji Mannesmanna Rexrotha). Mikroprocesorowy układ sterujący jest natomiast oryginalnym dziełem pracowników politechniki. Koordynuje on dopompowywanie lub odpompowywanie oleju do elementów resorujących i reguluje pracę elektrozaworów w trzech niezależnych obwodach hydraulicznych (zawieszenia przedniego, lewego zawieszenia tylnego i prawego zawieszenia tylnego), bowiem nadwozie samochodu ma trzy punkty podparcia. Dzieje się to na podstawie zbieranych przez czujniki informacji. Są to wielkości przyspieszeń i prędkości chwilowych, przemieszczeń nadwozia, kąta obrotu kierownicy oraz położenia pedału hamulca. Ich znajomość umożliwia dobranie prześwitu i przechyłu pojazdu do konkretnej sytuacji - obciążenia, dynamiki jazdy, toru ruchu itp. Efektem powinno być optymalne zachowanie się auta w kontekście osiągniętego poziomu komfortu i bezpieczeństwa czynnego. Obróbki zebranych danych wraz z przedstawieniem na ekranie wyników różnorodnych pomiarów dokonuje obecnie komputer typu laptop; docelowo mogłaby je gromadzić zintegrowana "czarna skrzynka". W razie uszkodzenia układu sterowania, nadwozie jest utrzymywane na poziomie zapewnianym przez pasywne zawieszenie hydropneumatyczne - dzięki zaworom hydromechanicznym.
W celu zainstalowania części składowych układu niezbędne byty pewne przeróbki. Z przedniego zawieszenia Poloneza znikły sprężyny śrubowe. Na miejscu amortyzatorów zamontowano siłowniki hydrauliczne. Konieczne okazało się przy tym wzmocnienie ich górnych punktów mocowania. Do prowadzenia tylnego mostu zastosowano dwa drążki wzdłużne, połączone z nadwoziem w tych samych miejscach co usunięte resory piórowe i o połowę od nich krótsze oraz poprzeczny drążek Panharda. Ten ostatni przejęto z Łady 2107, dodając odpowiedni wspornik. Siłowniki hydrauliczne również umieszczono w otworach po amortyzatorach. Warto dodać, że z doświadczeń tych skorzystała niedawno FSO przy budowie swych Analogów. Same głowice hydropneumatyczne znalazcy miejsce wewnątrz błotników i w bagażniku. W komorze silnika trzeba było wygospodarować przestrzeń na pompę i zbiornik oleju. Odpowiedniego poprowadzenia i umiejscowienia wymagały też przewody i złącza instalacji."
51
Napęd jest montowany w większości luksusowych i sportowych aut, tj. BMW, Mercedes czy Bentley. Napęd tylny nie przysparza tyle kłopotów, co napęd przedni. Podczas skręcania kół przy jednoczesnym dodawaniu gazu, tylne koła są dociskane do powierzchni, a więc przednie nie tracą przyczepności, a tylne posiadają dużo większą przyczepność niż przednie. Samochody tylnonapędowe zaczynają zacieśniać zakręt (mamy do czynienia z nadsterownością). Kierowca nie traci wtedy prędkości, bo nie musi puszczać gazu, bo wystarczy kontra kierownicą.
Podczas hamowania większa część masy samochodu przeniesiona zostaje na przód, co powoduje dociśnięcie go do powierzchni. W tym samym czasie tył unosi się do góry. Efektem tego jest w tym wypadku większa przyczepność przednich kół. Z tego powodu w większości samochodów hamulce tarczowe montowane są z przodu, bo to głównie przednie zawieszenie i koła wykonują pracę podczas hamowania.
37
ABS zapobiega zjawiskom występującym po zablokowaniu kół, takim jak ściąganie samochodu w bok, wirowanie samochodu, utrata kontroli nad kierowaniem samochodem. Długość drogi hamowania pojazdu wyposażonego w system ABS w porównaniu do identycznego pojazdu bez tego systemu uzależniona jest od kilku czynników, tj. warunki zewnętrzne oraz umiejętności kierowcy, tzn. mimo systemu ABS kierowca musi wiedzieć, jak sterować kierownicą by wyjść z ewentualnego poślizgu.
W samochodach bez systemu ABS kierowca musi starać się hamować tak, by utrzymać kontrolę nad samochodem. Zbyt słabe hamowanie wydłuża drogę hamowania, a zbyt mocne prowadzi do utraty sterowności. Zaleca się, by przy konieczności silnego hamowania stosować hamowanie pulsacyjne. Hamowanie to polega na intensywnym wciśnięciu hamulca, a w momencie, gdy koła przestają się obracać, odpuszczeniu hamulca, by natychmiast znów silnie nacisnąć hamulec.
W samochodzie wyposażonym w system ABS, najefektywniejszy sposobem hamowania jest jak najszybsze i jak najmocniejsze wciśnięcie pedału hamulca – nie należy używać hamowania pulsacyjnego.
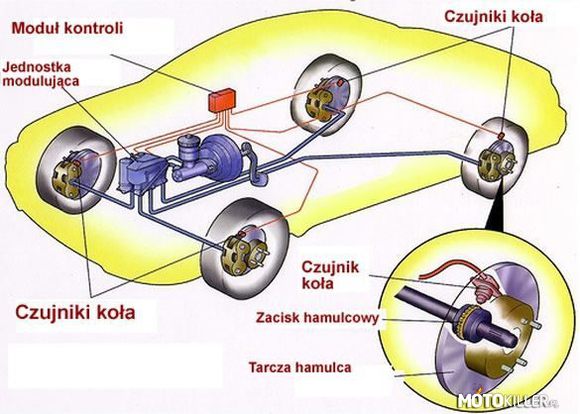
JAK DZIAŁA ABS:
Utrata sterowności samochodu podczas hamowania następuje, gdy koła z co najmniej jednej osi samochodu przestają się obracać. Wówczas różnice sił hamowania na poszczególnych kołach wprawiają samochód w ruch obrotowy wokół osi pionowej. System ABS naśladuje hamowanie pulsacyjne, ale robi to znacznie dokładniej niż kierowca.
System kontroluje obroty kół podczas hamowania i jeżeli kierowca naciśnie tak silnie na hamulec, że jedno z kół obraca się wolniej niż pozostałe, to system ABS zmniejsza na chwile siłę hamowania obwodu, w którym jest to koło lub tylko tego koła (w nowszych układach). Jeżeli koło ponownie zacznie się obracać, siła hamowania jest ponownie zwiększana. Cykle redukcji siły hamowania są bardzo szybkie.
57

ABS (Antiblockiersystem; Anti-Lock Braking System) zapobiegania blokowaniu się kół podczas hamowania.
ACC (Adaptive Cruise Control) utrzymuje zadaną prędkość, w razie potrzeby zmniejsza ją w celu zachowania bezpiecznego odstępu między samochodami.
Active Drive (Renault) z czterema kołami skrętnymi zapewnia precyzję prowadzenia, pewne utrzymywanie zamierzonego toru jazdy oraz ułatwia parkowanie.
AFIL (Citron), LDW (Volvo) ostrzega przed niezamierzonym przekroczeniem linii bocznej na drodze (bez włączonych kierunkowskazów). System przetwarza informację z czujników lub kamery i uruchamia generator drgań umieszczony w siedzeniu kierowcy lub ostrzega sygnałem głosowym.
ASR (Acceleration Slip Regulation) także TCS, TC, ASC system kontroli trakcji, nie dopuszcza do nadmiernego poślizgu kół pojazdu podczas przyspieszania.
BAS (Brake Assist System) także BA, EBA, EVA, wspomaga hamowanie w sytuacji awaryjnej, podnosi ciśnienie w układzie i umożliwia szybsze zatrzymanie pojazdu. System BAS zawsze połączony jest z układem ABS.
BLIS (Blind Spot Information System) system oparty na kamerach umieszczonych w lusterkach bocznych, pozwalający obserwować obszar wzdłuż boków i z tyłu samochodu. Gdy w monitorowanej strefie pojawi się inny pojazd, zapala się lampka ostrzegawcza przy zewnętrznym lusterku wstecznym po odpowiedniej stronie samochodu.
City Safety (Volvo) ostrzega kierowcę przed ewentualną kolizją, w razie potrzeby aktywuje hamulce zasadnicze. Wspomagany może być przez system ostrzegania Collision Warning (ostrzeżenie o kolizji z automatycznym hamowaniem), który monitoruje obszar przed autem za pomocą radaru i kamery, analizując na bieżąco sytuację na drodze.
DAC (Driver Alert Control) połączony z LDW (samochody Volvo), kontroluje czujność kierowcy. Korzystając z danych z kamery cyfrowej oraz danych z ruchów kierownicą, DAC porównuje niestandardowe zachowanie ze zwykłym stylem jazdy. Oprócz ostrzeżenia, na desce rozdzielczej pojawi się komunikat sugerujący przerwę.
Dwustopniowe airbagi kierowcy i pasażera napełniają się adekwatnie do siły uderzenia.
ESP (Electronic Stability Program), ESC (Electronic Stability Control) system stabilizacji, niezależnie od kierowcy przyhamowuje jedno lub kilka kół, naprowadzając pojazd na zadany tor jazdy. Kontrolowany jest przy pomocy układów ABS i ASR.
HDC (Hill Descent Control) oraz HHC (Hill Hold Control) zapobiega staczaniu się pojazdu podczas podjeżdżania na wzniesienie oraz zjeżdżania ze wzniesienia. System działa razem z układem hamulcowym.
IDIS (Intelligent Driver Information System), ComSense na bieżąco analizuje sytuację na drodze i w przypadku zagrożenia opóźnia dopływ do kierowcy mniej istotnych informacji z różnych układów w samochodzie, np. sygnalizację przychodzących połączeń telefonicznych.
Isofix to międzynarodowy standard mocowania fotelików do przewożenia dzieci. Z systemem fotelik staje się elementem struktury nadwozia.
Kurtyny boczne chronią głowy podróżnych siedzących na bocznych siedzeniach z przodu lub z tyłu pojazdu.
MSR to system uzupełniający ASR. Redukuje moment obrotowy silnika podczas redukcji biegów i zapobiega utracie przyczepności kół.
Opel Eye identyfikuje z wyprzedzeniem znaki drogowe oraz ostrzega kierowcę, jeśli ten przypadkowo opuści pas ruchu. Wyświetla na tablicy rozdzielczej informacje, które mają największe znaczenie z punktu widzenia bezpieczeństwa jazdy.
PPDB (Pyrotechnic Pedestrian Deployable Bonnet) chroni głowę pieszego podczas zderzenia z autem. Przy kolizji w masce eksplodują niewielkie ładunki wybuchowe. Unosząc maskę o kilkanaście centymetrów, zapewniają przestrzeń amortyzującą uderzenie.
RSC (Roll Stability Control) zapobiega dachowaniu pojazdu i działa na podobnej zasadzie jak ESP. W przypadku, gdy jednak dojdzie do przewrócenia pojazdu, ochronę zapewnia system ROPS (Roll Over Protection Structure), aktywujący napinacze pasów bezpieczeństwa, uruchamiając jednocześnie kurtynę boczną, która może być rozwinięta nawet przez kilkanaście sekund.
SIPS (Side Impact Protection System) ogranicza skutki zderzenia bocznego. Konstrukcja samochodu została zaprojektowana i wzmocniona tak, by przemieścić siłę zderzenia bocznego z rejonu pasażerów w inne części nadwozia i zapobiec uszkodzeniu kabiny.
Snow Motion reguluje poślizg kół napędowych, pozwalając na ruszenie i jazdę w trudnych warunkach, np. w kopnym śniegu. Działa podobnie jak ASR, jednak pozbawiony jest jego wad.
TPMS (Tire Pressure Monitoring System) monitoruje ciśnienie w oponach przy wykorzystaniu czujników w zaworze opony.
TSC, także TSA monitoruje stabilność przyczepy (także całego zestawu) i zapobiega tzw. wężykowaniu, kompensując ruchy przyczepy przez przyhamowanie jednego lub większej liczby kół.
Volvo On Call umożliwia rozmowę telefoniczną z operatorem systemu, dzięki GPS przekazuje informacje na temat dokładnej pozycji geograficznej pojazdu. Uruchamia się automatycznie podczas wypadku.
WHIPS (Whiplash Protection System), SAHR chroni kręgosłup i kręgi szyjne w chwili uderzenia w tył pojazdu.
15